
Table of Contents
6DOF Spline Fitting Project
- Features
- Directory Structure
- Installation
- Configuration
- Usage
- Algorithm Details
- Requirements
- Some runs
- Export to STEP
Industrial Robot B-Spline, NURBS & Velocity Control Comparison
- Overview
- Executive Summary
- Manufacturer Comparison Table
- Detailed Manufacturer Analysis
- NURBS Support in Industrial Robotics
- Velocity Profile Control Strategies
- Post-Processor Architecture Recommendations
- Orientation Interpolation Considerations
- Controller Cycle Time Reference
- Glossary
- References
Intellectual Property Protection Strategy
- Overview of Protection Options
- Immediate Actions - Evidence of Invention
- Belgian Patent Protection
- European Patent Protection
- International Patent Protection
- Trade Secret Protection
- Recommended Timeline
- Sample Registered Letter Text
- Comparison Table
- Fiscal Advantages - Belgian Innovation Income Deduction
- Next Steps Checklist
- Useful Contacts
This project was created with Jules.
GITHub : https://github.com/lucwens/SplineFitter
Read the Doc files where Claude/Gemini/ChatGPT made an analysis
Instructions, open command line and
.\.venv\Scripts\activate
pip install -r .\requirements.txt
cd .\Source\
.\main.py
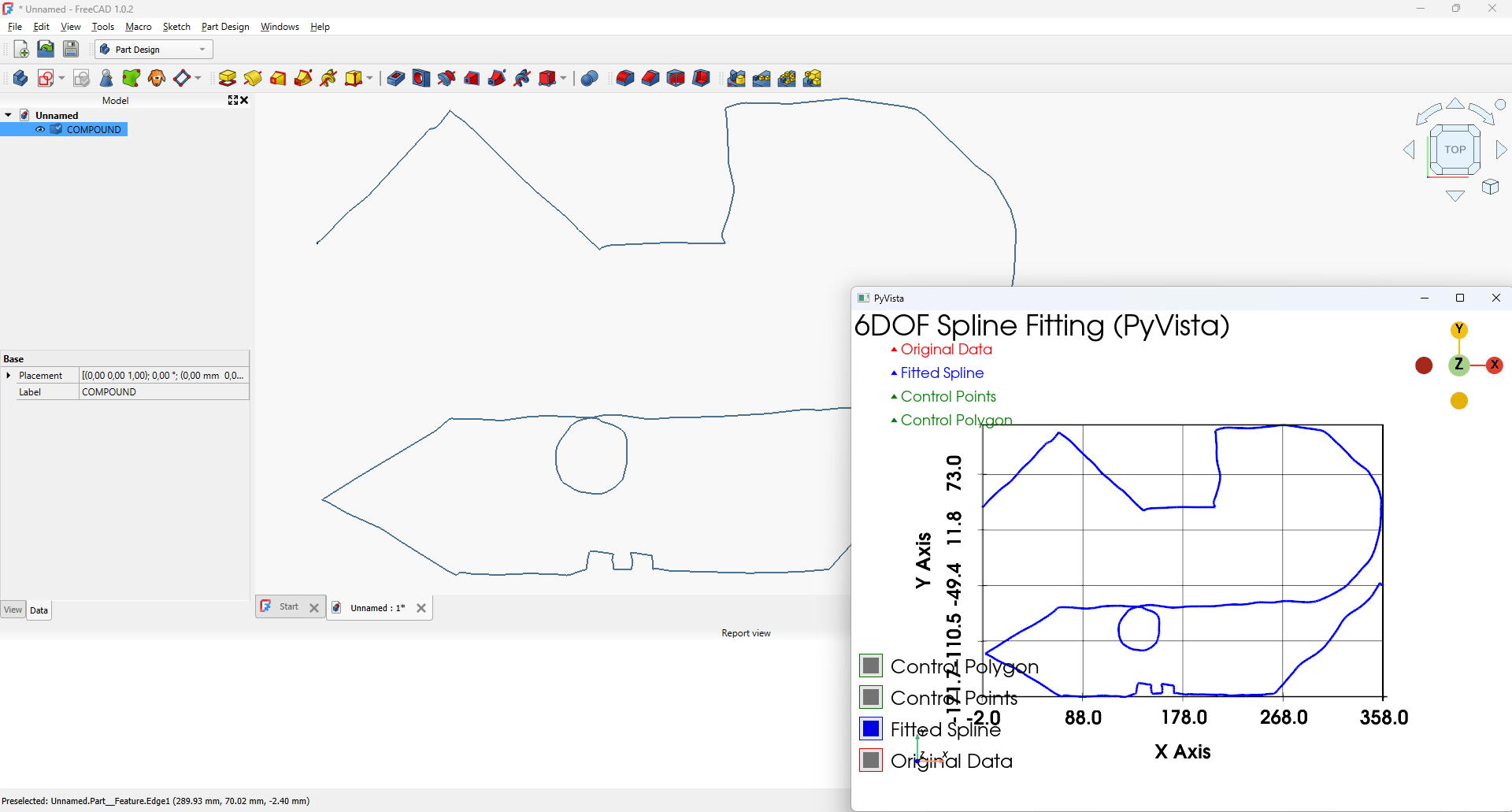
This will create a 3D view with the fitted spline.
I used the data that I captured from a manual run with the MSP over a printed Schmidt path for the AMT conference:
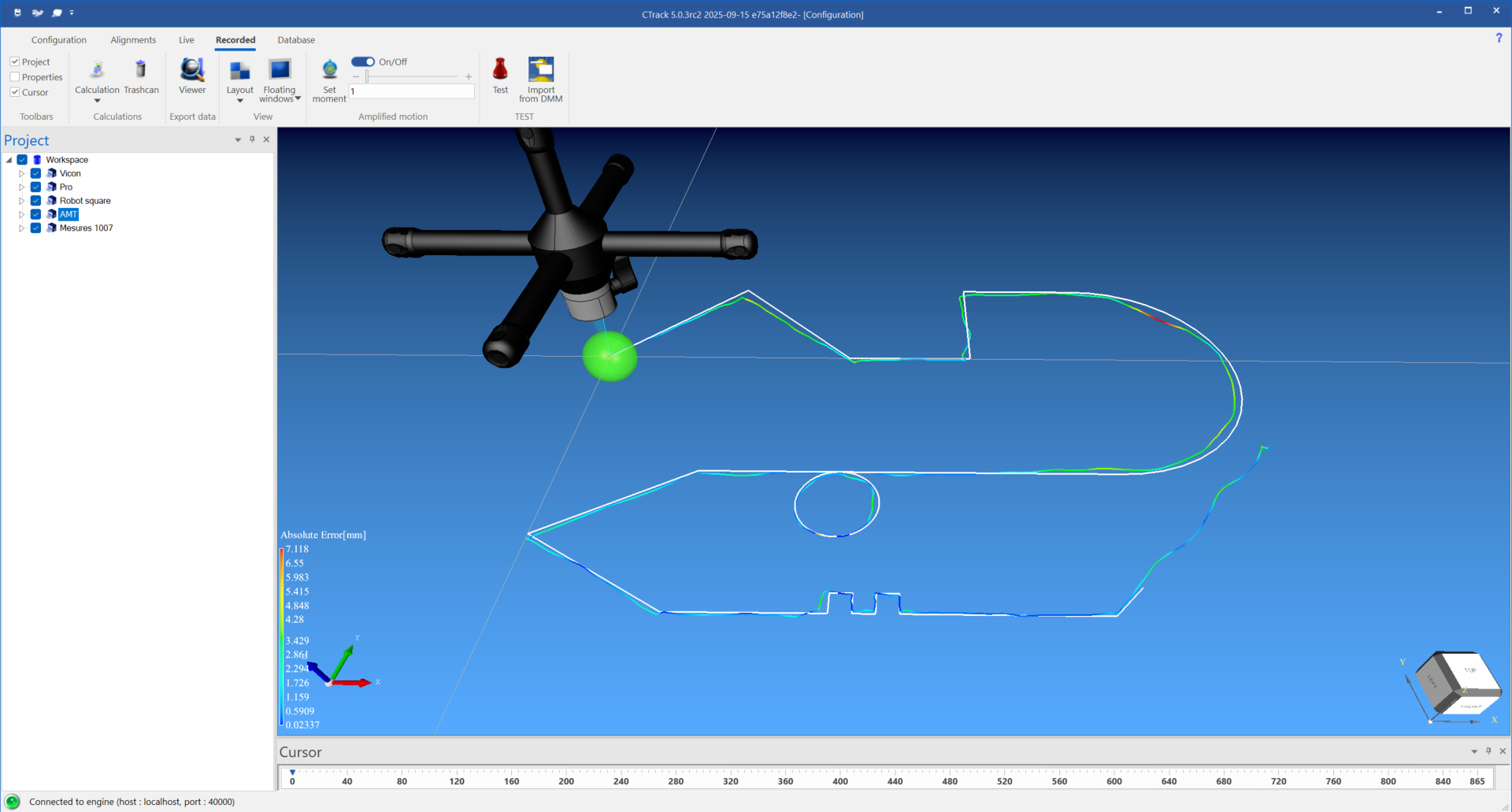
And also an output file with U values and residuals

Use the config.json file to change the behaviour.
{
"max_gap_duration": 0.5,
"positional_accuracy": 150.0,
"rotational_accuracy": 0.5,
"spline_degree": 3,
"output_filename": "../residuals.csv"
}
6DOF Spline Fitting Project
This project implements a Python-based pipeline for fitting B-splines to 6-Degree-of-Freedom (6DOF) trajectory data (Position + Orientation). It is designed to handle high-frequency optical tracking data, including potential gaps (NaNs) and varying motion dynamics.
Features
- Data Loading & Segmentation: Robustly loads CSV data and segments it based on validity, handling gaps (occlusions) by splitting the trajectory into reliable segments.
- Data Reduction: Implements a modified Ramer-Douglas-Peucker (RDP) algorithm for 6DOF data to significantly reduce the number of control points while maintaining trajectory fidelity within specified tolerances.
Spline Fitting:
- Position: Fits cubic B-splines to X, Y, Z coordinates.
- Orientation: Fits splines to orientation data by mapping Unit Quaternions to a Euclidean Tangent Space (using the Logarithmic map), fitting B-splines in that space, and mapping back (Exponential map) to ensure valid rotations.
- Visualization: Interactive 3D visualization using PyVista, showing the original noisy data, the smooth fitted spline, and the control points (knots). Supports interactive toggles for visibility.
- Analysis: Automatically calculates residuals (deltas) between the measured data and the fitted spline and saves them to a CSV file.
- Configuration: All key parameters are configurable via a JSON file.
Directory Structure
Source/ ├── data/ # (Optional) Directory for input data ├── lib/ # Core libraries │ ├── data_loader.py # Data loading and segmentation logic │ ├── reduction.py # 6DOF RDP algorithm │ ├── spline_fitting.py # Spline fitting logic │ └── analysis.py # Residuals calculation ├── tests/ # Unit tests │ ├── test_loader.py │ ├── test_reduction.py │ └── test_spline.py ├── visualizer_pv.py # PyVista 3D plotting utility ├── main.py # Main entry point README.md # This file requirements.txt # Python dependencies config.json # Configuration file
Installation
- Ensure you have Python 3 installed.
- Install the required dependencies:
pip install -r requirements.txt
Configuration
The processing parameters are defined in config.json at the root of the project. You can modify these values to tune the fitting process:
{
"max_gap_duration": 0.5, // Maximum duration (seconds) of a gap before splitting segments
"positional_accuracy": 0.1, // Tolerance for position error (mm) in RDP reduction
"rotational_accuracy": 0.5, // Tolerance for rotational error (degrees) in RDP reduction
"spline_degree": 3 // Degree of the B-spline (e.g., 3 for cubic)
}
Usage
Running the Main Script
To run the complete pipeline (Load -> Reduce -> Fit -> Visualize):
python3 Source/main.py
The script reads parameters from config.json and expects the data file at Data/Schmidt.csv.
Outputs:
- Visualization: An interactive 3D window showing the trajectory.
Residuals: A file Output/residuals.csv containing the calculated errors for every time step:
- time, u: Timestamp (spline parameter).
- delta_x, delta_y, delta_z: Position errors.
- delta_roll, delta_pitch, delta_yaw: Orientation errors (radians).
Running Tests
To verify the correctness of the algorithms:
# From the project root export PYTHONPATH=$PYTHONPATH:. python3 Source/tests/test_loader.py python3 Source/tests/test_reduction.py python3 Source/tests/test_spline.py
Algorithm Details
1. Data Preprocessing
The DataLoader reads the CSV and checks for NaN values. Continuous sequences of valid data are grouped into Segments. If a gap between valid points exceeds max_gap_duration (default 0.5s), a new segment is created. Small gaps are implicitly bridged during the fitting phase if they are within a segment.
2. Data Reduction (RDP)
The Ramer-Douglas-Peucker (RDP) algorithm is adapted for 6DOF. It recursively splits a trajectory segment if the maximum deviation of intermediate points from the interpolated path (Linear for position, SLERP for rotation) exceeds a threshold.
- Position Error: Euclidean distance.
- Rotation Error: Geodesic distance (angle) between quaternions.
3. Spline Fitting
- Knots: The timestamps of the points retained by the RDP algorithm are used as the knots for the B-spline. This ensures control points are placed where they are most needed (curves, stops).
Orientation Fitting:
- A reference rotation qrefqref is chosen (first valid point).
- All orientations qiqi are mapped to a 3D rotation vector ωiωi in the tangent space: ωi=2⋅log(qref−1∗qi)ωi=2⋅log(qref−1∗qi).
- A cubic B-spline is fitted to the ω(t)ω(t) trajectory.
- Evaluation converts interpolated ω(t)ω(t) back to quaternions: q(t)=qref∗exp(ω(t)/2)q(t)=qref∗exp(ω(t)/2).
Requirements
- numpy
- scipy
- matplotlib
- pandas
- pyvista
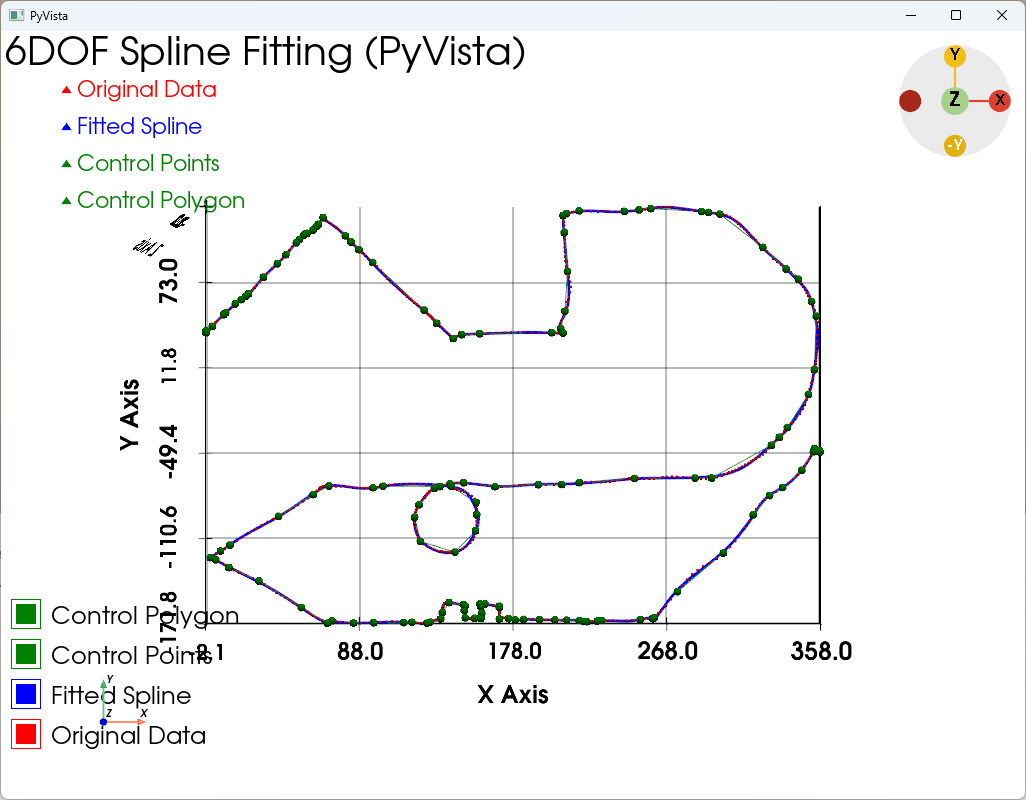
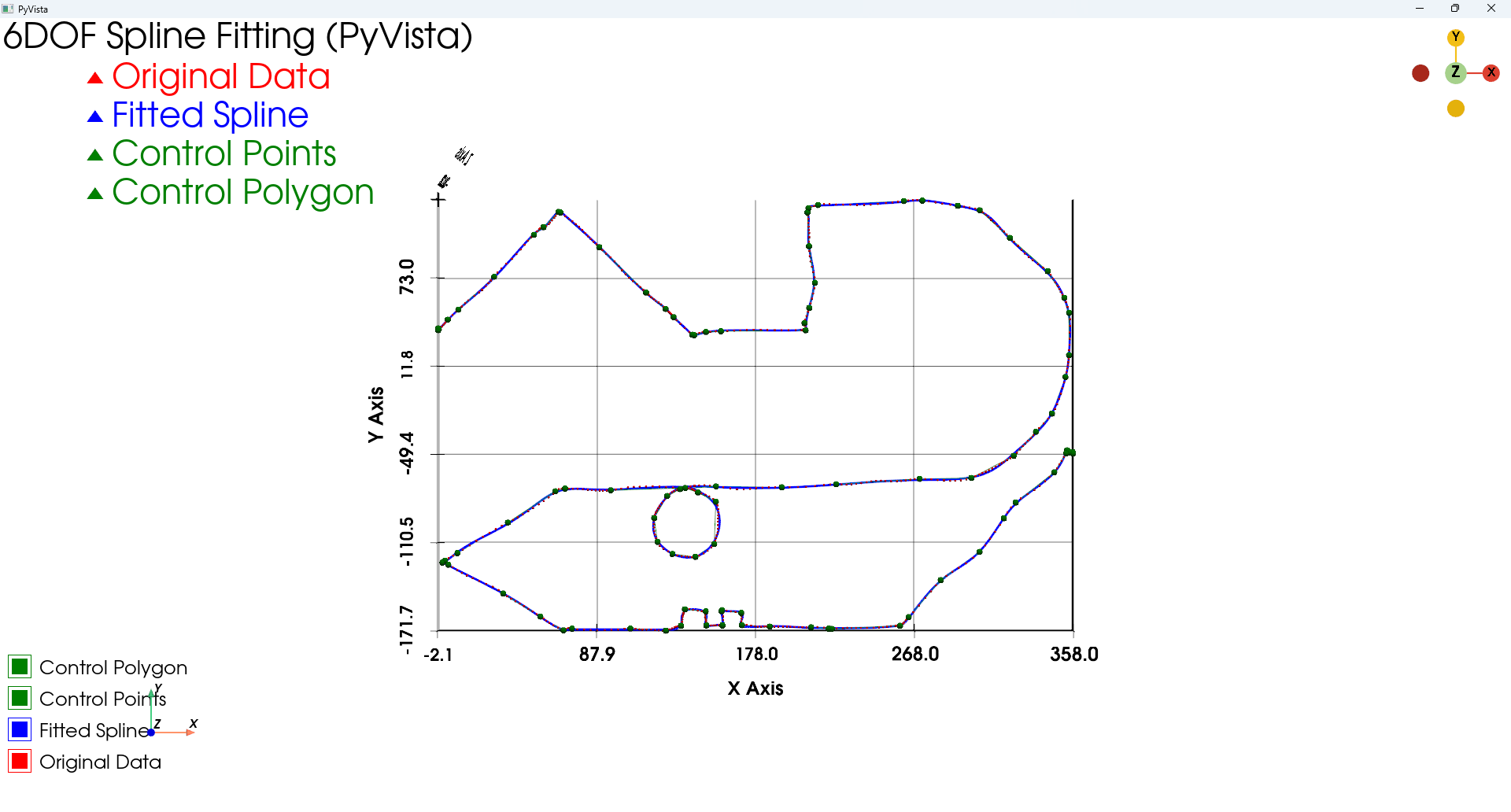
Some runs
{
"max_gap_duration": 0.5,
"positional_accuracy": 20,
"rotational_accuracy": 20,
"spline_degree": 3,
"output_filename": "residuals.csv"
}
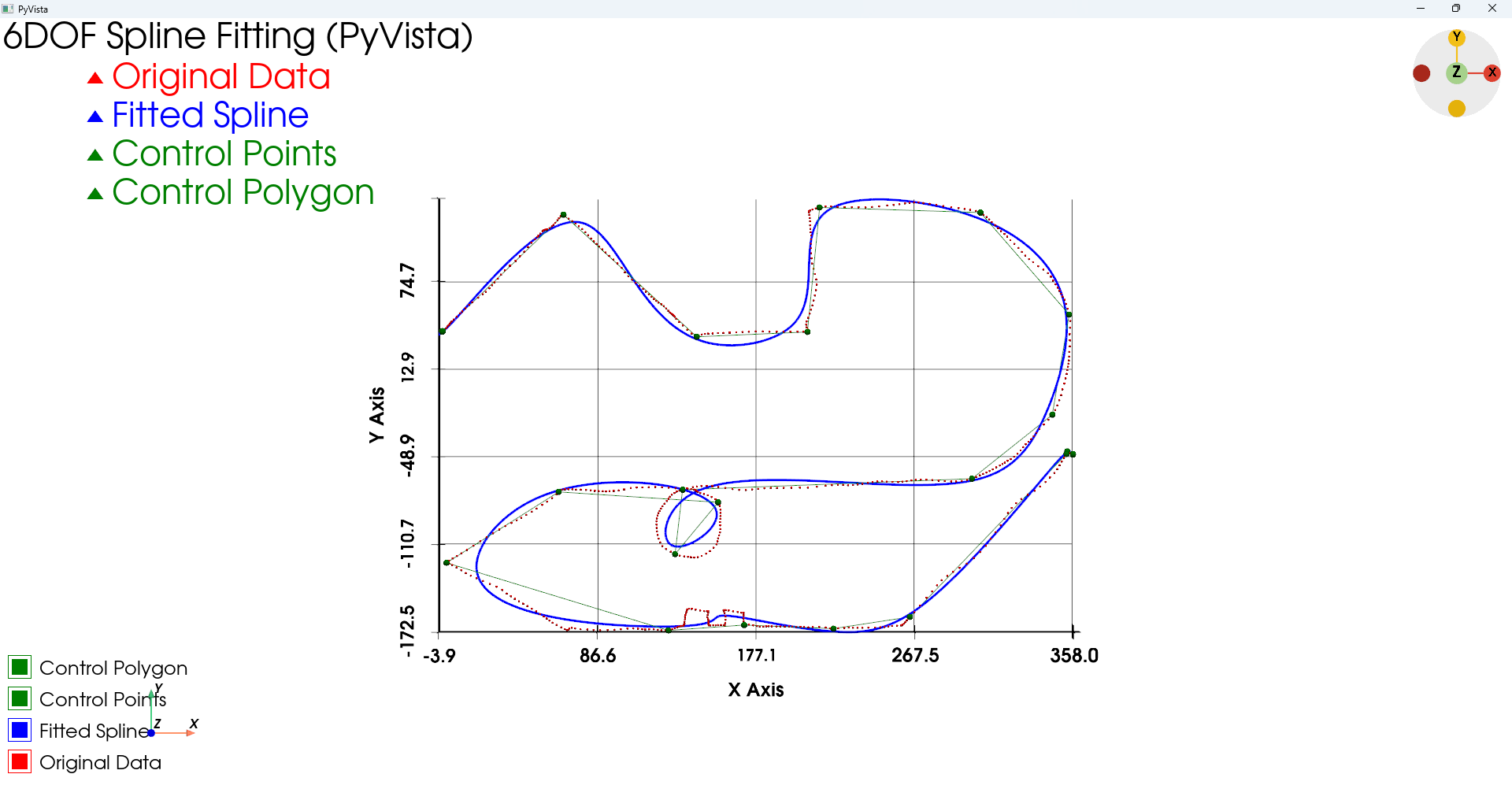
{
"max_gap_duration": 0.5,
"positional_accuracy": 2,
"rotational_accuracy": 2,
"spline_degree": 3,
"output_filename": "residuals.csv"
}
Export to STEP
Make sure to hit the "Compound" option in FreeCAD.
Industrial Robot B-Spline, NURBS & Velocity Control Comparison
Overview
This document provides a comprehensive comparison of how major industrial robot manufacturers handle B-spline curves, NURBS interpolation, and velocity control over complex paths. This is particularly relevant for applications involving:
- Playback of recorded 6DOF trajectories
- Path teaching from optical tracking/metrology systems
- Complex surface following applications
- Laser processing, dispensing, and painting
Executive Summary
Key Finding: None of the major industrial robot controllers natively support true B-spline or NURBS interpolation at the controller level. What manufacturers call "spline" motion is typically:
- Proprietary smoothing algorithms between taught waypoints
- Polynomial corner blending (parabolic or higher-order)
- Zone-based trajectory blending
For true B-spline path following with parametric velocity control, external trajectory generation with dense waypoint sampling is required.
Manufacturer Comparison Table
| Manufacturer | Controller | Native Spline Type | True B-Spline/NURBS | Velocity Control | Key Commands |
|---|---|---|---|---|---|
| KUKA | KRC4/KRC5 (KSS 8.x+) | CP Spline Block (C2-continuous) | ❌ No | CONST_VEL, $VEL.CP | SPLINE...ENDSPLINE, SPL, SLIN |
| FANUC | R-30iB/R-30iB+ | CNT/CR blending | ❌ No | Per-motion mm/sec, CNT% | L, J, C with CNT/CR/FINE |
| ABB | IRC5 (RAPID) | Zone-based blending | ❌ No | speeddata, zonedata | MoveL, MoveJ, MoveC |
| Yaskawa | YRC1000 (INFORM) | SplineMove (parabolic) | ❌ No | mm/sec per motion | MOVJ, MOVL, MOVC, MOVS |
| Universal Robots | e-Series (URScript) | MoveP (circular blend) | ❌ No | m/s, m/s², blend radius | movej, movel, movec, movep |
| COMAU | C5G/C5G+ (PDL2) | MOVEFLY blending | ❌ No | Per-motion velocity | MOVE, MOVEFLY, MOVE LINEAR |
| Stäubli | CS8/CS9 (VAL3) | Blend modes | ❌ No | mdesc (vel, accel, decel) | movej, movel, movec |
Detailed Manufacturer Analysis
KUKA (KRC4/KRC5 - KRL)
Spline Capabilities
KUKA's spline motion is the most advanced among traditional industrial robots, but it is not a true mathematical B-spline. It uses model-based planning to create C2-continuous (smooth up to second derivative) paths through taught waypoints.
Motion Types
krl
; CP Spline Block - Cartesian Path SPLINE WITH $VEL.CP = 0.5 SPL point1 SPL point2 WITH $VEL.CP = 0.3 ; Per-segment velocity SLIN point3 ; Linear segment within spline SCIRC aux_point, end_point ; Circular segment within spline ENDSPLINE ; PTP Spline Block - Joint Space PTP_SPLINE SPTP point1 SPTP point2 ENDSPLINE
Velocity Control Features
| Feature | Description |
|---|---|
| $VEL.CP | Cartesian path velocity (m/s) |
| CONST_VEL | Constant velocity range within spline block |
| $ACC_AXIS | Joint acceleration limits |
| $SPL_VEL_RESTR | Cartesian acceleration restriction |
| TIME_BLOCK | Time-based motion control |
Key Characteristics
- C2 continuity: Position, velocity, and acceleration are continuous
- Model-based planning: Automatically drives as fast as physical limits allow
- Path accuracy: No velocity-dependent path deviations
- Look-ahead: Full trajectory pre-calculation
Limitations
- Teaching positions too close together causes velocity reduction
- Mixing legacy (LIN/PTP) and spline motions resets motion planner
- Not a true B-spline - internally uses proprietary interpolation
FANUC (R-30iB - TP/KAREL)
Spline Capabilities
FANUC does not have native spline interpolation in the traditional sense. Path smoothing is achieved through:
- CNT (Continuous): Percentage-based corner blending (0-100%)
- CR (Corner Radius): Geometric radius specification (requires Advanced Motion Package)
- S-Motion (v9.30p04+): Paid option for constant velocity through points
Motion Types
fanuc
; Standard motions with blending L P[1] 500mm/sec CNT100 ; Linear with maximum blending L P[2] 500mm/sec CR50 ; Linear with 50mm corner radius J P[3] 100% CNT50 ; Joint with 50% blending C P[4] P[5] 200mm/sec FINE ; Circular, stop at endpoint ; Arc moves (closest to spline-like behavior) A P[1] 1000mm/sec CNT100 ; Arc through points
Velocity Control Features
| Feature | Description |
|---|---|
| Speed (mm/sec or %) | Per-motion speed specification |
| CNT (0-100) | Blending percentage (higher = smoother, less accurate) |
| CR (mm) | Corner radius (Advanced Motion Package required) |
| $USEMAXACCEL | Enable fast acceleration feature |
| S-Motion | Constant velocity through taught points (v9.30+) |
Key Characteristics
- Trade-off: CNT100 = smooth but path deviation; FINE = accurate but stops
- Look-ahead: Requires constants (not variables) for full look-ahead
- No true spline: Polynomial corner blending only
Important Notes
CNT value meaning: - CNT0 = Robot decelerates to stop at point (like FINE) - CNT100 = Maximum blending, robot may never reach exact point - CNT is NOT a percentage of velocity
ABB (IRC5 - RAPID)
Spline Capabilities
ABB uses zone-based blending with parabolic corner paths. No native spline interpolation.
Motion Types
rapid
; Motion with zone blending MoveL p1, v500, z50, tool0; ! Linear, 50mm zone MoveJ p2, v1000, z100, tool0; ! Joint, 100mm zone MoveC p_via, p3, v200, z10, tool0; ! Circular arc ; Fine positioning (no blending) MoveL p4, v100, fine, tool0; ; With custom speed VAR speeddata vCustom := [500, 100, 5000, 1000]; MoveL p5, vCustom, z20, tool0;
Speed Data Structure
rapid
; speeddata = [v_tcp, v_ori, v_leax, v_reax] ; v_tcp: TCP speed in mm/s ; v_ori: Orientation speed in degrees/s ; v_leax: Linear external axis speed in mm/s ; v_reax: Rotating external axis speed in degrees/s CONST speeddata v500 := [500, 500, 5000, 1000];
Zone Data Structure
rapid
; zonedata controls corner path blending ; Predefined: fine, z0, z1, z5, z10, z15, z20, z30, z40, z50, z60, z80, z100, z150, z200 ; fine = stop point (no blending) ; z50 = 50mm zone radius for path blending
Velocity Control Features
| Feature | Description |
|---|---|
| speeddata | TCP velocity, orientation velocity, external axes |
| zonedata | Corner path blending radius |
| PathAccLim | Reduce TCP acceleration along path |
| CorrWrite | Real-time path correction |
| MultiMove | Synchronized multi-robot velocity |
Yaskawa/Motoman (YRC1000 - INFORM)
Spline Capabilities
Yaskawa's SplineMove creates parabolic paths through three taught points. Not a true B-spline.
Motion Types
inform
; Joint interpolation MOVJ VJ=50.00 ; Linear interpolation MOVL V=500.0 ; Circular interpolation MOVC V=200.0 ; Spline interpolation (parabolic through 3 points) MOVS V=300.0
Velocity Control Features
| Feature | Description |
|---|---|
| V= (mm/sec) | TCP velocity for Cartesian moves |
| VJ= (%) | Joint velocity percentage |
| ARATION | Analog output proportional to TCP speed |
| YMConnect | External streaming interface (YRC1000+) |
External Control Options
YMConnect: Buffer-based motion streaming - Points queued in buffer - Motion planner interpolates through points - Same planner as INFORM jobs - Available on YRC1000 and newer MotoPlus: Direct controller access - 4ms interpolation cycle - mpExRcsIncrementMove for streaming - Requires WAIT command in INFORM job
Universal Robots (e-Series - URScript)
Spline Capabilities
UR uses MoveP (process move) which provides circular blending between linear segments. Not true spline interpolation.
Motion Types
urscript
# Joint move movej(target, a=1.4, v=1.05, t=0, r=0) # Linear move movel(pose, a=1.2, v=0.25, t=0, r=0) # Circular move (via point + end point) movec(pose_via, pose_to, a=1.2, v=0.25, r=0) # Process move (constant velocity, circular blending) movep(pose, a=1.2, v=0.25, r=0.05)
Parameters
| Parameter | Description |
|---|---|
| a | Acceleration (m/s² for Cartesian, rad/s² for joint) |
| v | Velocity (m/s for Cartesian, rad/s for joint) |
| t | Time (seconds) - overrides a and v if specified |
| r | Blend radius (meters) |
Real-Time Control
urscript
# Servo control at 500Hz servoj(q, a, v, t=0.008, lookahead_time=0.1, gain=300) # Path offset overlay path_offset_set(offset, type) path_offset_set_alpha_filter(alpha) # Smooth offset velocity
Key Characteristics
- 500Hz control loop (e-Series)
- MoveP: Accelerates to constant velocity, circular blends
- servoj: Real-time streaming at 125Hz or 500Hz
- path_offset_*: Real-time path modification overlay
COMAU (C5G/C5G+ - PDL2)
Spline Capabilities
COMAU uses MOVEFLY for fly-by point blending. The Open Controller (C5GOpen) allows external trajectory generation including NURBS.
Motion Types
pdl2
; Standard moves MOVE TO position MOVE LINEAR TO position MOVEFLY TO position ; Fly-by (blending) ; With speed control $ARM_SPD_OVR := 50 ; 50% speed override MOVE LINEAR TO position WITH $MOVE_SPD = 500
Open Controller (C5GOpen)
ORL Motion (ORLM): External trajectory library - Simulates CRC motion algorithms - Allows NURBS trajectory generation externally - Requires specific license - Real-time communication at 400µs cycle
Stäubli (CS8/CS9 - VAL3)
Spline Capabilities
Stäubli uses motion descriptors (mdesc) with blend modes for path smoothing. No native spline.
Motion Types
val3
// Motion descriptor defines motion parameters mdesc mNomSpeed mNomSpeed.vel = 100 // Velocity (% or mm/s) mNomSpeed.accel = 100 // Acceleration mNomSpeed.decel = 100 // Deceleration mNomSpeed.blend = joint // Blend mode: joint/Cartesian/off mNomSpeed.leave = 50 // Leave distance (mm) mNomSpeed.reach = 50 // Reach distance (mm) // Motions movej(jTarget, tTool, mNomSpeed) movel(pTarget, tTool, mNomSpeed) movec(pVia, pTarget, tTool, mNomSpeed)
Blend Modes
| Mode | Description |
|---|---|
| joint | TCP trajectory unconstrained between leave/reach |
| Cartesian | TCP stays on plane between leave/reach |
| off | No blending (stop at point) |
NURBS Support in Industrial Robotics
Current State
No major industrial robot controller natively supports NURBS interpolation. Research implementations exist but require:
- External NURBS interpolation - Calculate points on the curve externally
- Dense waypoint streaming - Feed sampled points to robot controller
- Real-time interfaces - Use streaming protocols for high-fidelity reproduction
Research Approaches
Academic and industrial research has demonstrated NURBS interpolation on robots using:
| Approach | Description | Complexity |
|---|---|---|
| Waypoint sampling | Sample NURBS at intervals, send as waypoints | Low |
| Real-time streaming | Stream interpolated positions at controller cycle rate | High |
| Custom controller | Implement NURBS kernel on open controller | Very High |
Typical NURBS Implementation Flow
1. Define NURBS curve with control points and knot vector 2. Determine chord error tolerance 3. Adaptively sample curve to meet tolerance 4. Calculate velocity from parametric spacing 5. Generate manufacturer-specific motion commands 6. Upload/stream to robot controller
Velocity Profile Control Strategies
For 6DOF B-Spline with U-Parameterized Velocity
Given a B-spline with:
- Control points in 6DOF (position + orientation)
- u.txt mapping measurement points to spline parameter u
- Implicit velocity profile from u-spacing
Strategy 1: Dense Waypoint Sampling
For each u value in u.txt:
1. Evaluate B-spline at u → 6DOF pose
2. Calculate velocity from Δu and original timestamps
3. Output as motion command with velocity
Pros: Works on all robots, preserves timing Cons: May hit point limits, dense paths slow controllers
Strategy 2: Per-Segment Velocity (KUKA/ABB)
python
# Calculate inter-segment velocities
for i in range(len(u_values) - 1):
dt = timestamps[i+1] - timestamps[i]
ds = arc_length(spline, u_values[i], u_values[i+1])
velocity[i] = ds / dt
Pros: Native controller interpolation Cons: Not all manufacturers support per-segment velocity
Strategy 3: External Streaming
| Robot | Interface | Cycle Rate |
|---|---|---|
| KUKA | RSI (Robot Sensor Interface) | 4ms |
| FANUC | J519 (Stream Motion) | 8ms |
| ABB | EGM (Externally Guided Motion) | 4ms |
| Yaskawa | YMConnect / MotoPlus | 4ms |
| UR | RTDE | 2ms (500Hz) |
Pros: Highest fidelity path reproduction Cons: Requires real-time system, most complex
Strategy 4: Time-Based Motion
krl
; KUKA TIME_BLOCK example SPLINE WITH TIME_BLOCK SPL point1 SPL point2 WITH $SPL_TIME = 0.5 ; 0.5 seconds for this segment ENDSPLINE
Pros: Direct timing control Cons: Limited manufacturer support
Post-Processor Architecture Recommendations
Generic Post-Processor Structure
cpp
class RobotPostProcessor {
public:
struct Waypoint6DOF {
double x, y, z; // Position (mm)
double rx, ry, rz; // Orientation (degrees or radians)
double velocity; // Calculated from u-spacing
double blend_radius; // Zone/CNT parameter
};
virtual std::string generateProgram(
const BSpline6DOF& spline,
const std::vector<double>& u_values,
const std::vector<double>& timestamps
) = 0;
protected:
std::vector<Waypoint6DOF> sampleSpline(
const BSpline6DOF& spline,
const std::vector<double>& u_values,
const std::vector<double>& timestamps
) {
std::vector<Waypoint6DOF> waypoints;
for (size_t i = 0; i < u_values.size(); ++i) {
auto pose = spline.evaluate(u_values[i]);
Waypoint6DOF wp;
wp.x = pose.position.x;
wp.y = pose.position.y;
wp.z = pose.position.z;
wp.rx = pose.orientation.rx;
wp.ry = pose.orientation.ry;
wp.rz = pose.orientation.rz;
// Calculate velocity from timing
if (i > 0) {
double dt = timestamps[i] - timestamps[i-1];
double ds = distance(waypoints.back(), pose);
wp.velocity = ds / dt;
}
waypoints.push_back(wp);
}
return waypoints;
}
};
KUKA Post-Processor Example
cpp
class KukaPostProcessor : public RobotPostProcessor {
public:
std::string generateProgram(
const BSpline6DOF& spline,
const std::vector<double>& u_values,
const std::vector<double>& timestamps
) override {
auto waypoints = sampleSpline(spline, u_values, timestamps);
std::stringstream ss;
ss << "DEF SplineProgram()\n";
ss << "$TOOL = TOOL_DATA[1]\n";
ss << "$BASE = BASE_DATA[1]\n\n";
ss << "SPLINE\n";
for (size_t i = 0; i < waypoints.size(); ++i) {
const auto& wp = waypoints[i];
ss << " SPL {X " << wp.x
<< ", Y " << wp.y
<< ", Z " << wp.z
<< ", A " << wp.rx
<< ", B " << wp.ry
<< ", C " << wp.rz << "}";
if (wp.velocity > 0) {
ss << " WITH $VEL.CP = " << wp.velocity / 1000.0; // m/s
}
ss << "\n";
}
ss << "ENDSPLINE\n";
ss << "END\n";
return ss.str();
}
};
ABB Post-Processor Example
cpp
class AbbPostProcessor : public RobotPostProcessor {
public:
std::string generateProgram(
const BSpline6DOF& spline,
const std::vector<double>& u_values,
const std::vector<double>& timestamps
) override {
auto waypoints = sampleSpline(spline, u_values, timestamps);
std::stringstream ss;
ss << "MODULE SplineModule\n";
ss << " PROC main()\n";
ss << " ConfL \\Off;\n";
ss << " SingArea \\Wrist;\n\n";
for (size_t i = 0; i < waypoints.size(); ++i) {
const auto& wp = waypoints[i];
// Create robtarget
ss << " CONST robtarget p" << i << " := [["
<< wp.x << "," << wp.y << "," << wp.z << "],"
<< "[" << quaternionFromEuler(wp.rx, wp.ry, wp.rz) << "],"
<< "[0,0,0,0],[9E9,9E9,9E9,9E9,9E9,9E9]];\n";
// Create speeddata
ss << " CONST speeddata v" << i << " := ["
<< wp.velocity << ",500,5000,1000];\n";
// Motion command
std::string zone = (i == waypoints.size() - 1) ? "fine" : "z10";
ss << " MoveL p" << i << ", v" << i << ", " << zone << ", tool0;\n\n";
}
ss << " ENDPROC\n";
ss << "ENDMODULE\n";
return ss.str();
}
};
Orientation Interpolation Considerations
Challenge
Robot controllers typically use linear interpolation (SLERP-like) between orientation waypoints. Your B-spline may use different orientation interpolation, leading to:
- Path deviation in orientation
- Need for denser sampling in high-curvature orientation regions
Solutions
- Denser sampling: Increase sampling density where orientation changes rapidly
- Quaternion representation: Use quaternions for smoother interpolation
- Orientation velocity limits: Some controllers limit orientation change rate
cpp
// Check orientation change rate
double orientationChangeRate(const Waypoint6DOF& a, const Waypoint6DOF& b, double dt) {
// Calculate angular velocity
Quaternion qa = eulerToQuaternion(a.rx, a.ry, a.rz);
Quaternion qb = eulerToQuaternion(b.rx, b.ry, b.rz);
double angle = qa.angularDistanceTo(qb);
return angle / dt; // rad/s
}
// Adaptive resampling for orientation
std::vector<double> adaptiveResample(
const BSpline6DOF& spline,
const std::vector<double>& u_values,
double maxOrientationRate // rad/s
) {
std::vector<double> newUValues;
// Add intermediate u values where orientation changes too fast
// ...
}
Controller Cycle Time Reference
| Manufacturer | Controller | Typical Cycle Time | Notes |
|---|---|---|---|
| KUKA | KRC4/KRC5 | 4-12 ms | RSI at 4ms |
| FANUC | R-30iB | 8 ms | Stream Motion at 8ms |
| ABB | IRC5 | 4 ms | EGM at 4ms |
| Yaskawa | YRC1000 | 4 ms | MotoPlus default |
| Universal Robots | e-Series | 2 ms | RTDE at 500Hz |
| COMAU | C5G+ | 0.4 ms | Open controller |
| Stäubli | CS9 | 4 ms | - |
Important: If your u-samples are denser than the controller cycle time, you may need to:
- Downsample the trajectory
- Use the robot's built-in interpolation
- Stream points in real-time
Glossary
| Term | Definition |
|---|---|
| B-spline | Basis spline - parametric curve defined by control points and basis functions |
| NURBS | Non-Uniform Rational B-Spline - generalization of B-splines with weighted control points |
| CNT | Continuous (FANUC) - percentage-based corner blending |
| Zone | ABB's term for corner blending region |
| Blend Radius | Distance from waypoint where blending begins/ends |
| CP | Continuous Path - motion mode maintaining constant TCP velocity |
| PTP | Point-to-Point - joint-interpolated motion |
| RSI | Robot Sensor Interface (KUKA) - real-time external control |
| EGM | Externally Guided Motion (ABB) - real-time path correction |
| RTDE | Real-Time Data Exchange (UR) - real-time communication interface |
References
- KUKA System Software 8.x Operating and Programming Instructions
- FANUC Robot Series Operator's Manual
- ABB RAPID Reference Manual
- Yaskawa INFORM Language Manual
- Universal Robots URScript Manual
- COMAU PDL2 Programming Language Manual
- Stäubli VAL3 Reference Manual
Document created: November 2025 For applications involving optical tracker trajectory playback and 6DOF B-spline path reproduction
Intellectual Property Protection Strategy
Nominal Path Correction Algorithm for Robot Trajectory Compensation
This document outlines strategies for protecting the intellectual property (IP) related to the nominal path correction algorithm developed for robot trajectory compensation.
A self-registred mail was sent on 1/12/2025 with the letter and the source code.
This can be found on
- d:\dropbox\ctech\patents\spline fitting
- https://github.com/lucwens/SplineFitter/tree/main/Doc
Table of Contents
- Overview of Protection Options
- Immediate Actions - Evidence of Invention
- Belgian Patent Protection
- European Patent Protection
- International Patent Protection
- Trade Secret Protection
- Recommended Timeline
- Sample Registered Letter Text
- Comparison Table
- Fiscal Advantages - Belgian Innovation Income Deduction
Overview of Protection Options
Types of IP Protection Available
| Type | What it Protects | Duration | Cost Range |
|---|---|---|---|
| Patent | Technical invention/method | 20 years | €5,000 - €50,000+ |
| Trade Secret | Confidential know-how | Unlimited (if kept secret) | Low (internal costs) |
| Copyright | Code implementation | 70 years after author's death | Free (automatic) |
| Prior Art Evidence | Establishes invention date | N/A | €10 - €100 |
What Can Be Protected?
For this algorithm, potentially patentable elements include:
- The method of calculating trajectory corrections by applying inverse error vectors
- The combination of 6DOF spline fitting with error compensation
- The specific implementation of orientation correction in tangent space
- The iterative refinement process for high-precision applications
Immediate Actions - Evidence of Invention
Option 1: Registered Letter to Yourself (i-DEPOT Alternative)
Cost: €5-10 (postage)
Timeline: Immediate
Legal Standing: Limited but useful as supporting evidence
Send a sealed, registered letter to yourself containing:
- Technical description of the invention
- Date of conception
- Inventor name(s)
- Supporting documentation (code, diagrams)
Important: Do NOT open the letter. The sealed postal date stamp serves as evidence.
Option 2: i-DEPOT (Benelux Office for Intellectual Property)
Cost: €37 (online) or €47 (paper) for 5 years
Timeline: Same day (online)
Legal Standing: Official evidence of existence at a specific date
Website: https://www.boip.int/en/entrepreneurs/ideas/i-depot
Advantages:
- Officially recognized in Benelux
- Can be renewed indefinitely
- Digital storage option
- Accepted by courts as evidence
Option 3: Notarized Document
Cost: €50-150
Timeline: Same day
Legal Standing: Strong legal evidence
Have a notary certify the existence and content of your technical documentation on a specific date.
Belgian Patent Protection
Belgian National Patent
Filing Office: Belgian Office for Intellectual Property (OPRI/BOIP)
Website: https://economie.fgov.be/en/themes/intellectual-property/patents
Costs (Approximate)
| Stage | Official Fees | Attorney Fees (Optional) |
|---|---|---|
| Filing | €50 | €2,000 - €4,000 |
| Search Report | €300 | Included above |
| Annual Fees (Years 3-20) | €40 - €600/year | - |
| Total (20 years) | ~€3,000 | €5,000 - €8,000 |
Process
- File application with OPRI (description, claims, abstract, drawings)
- Formal examination (2-3 months)
- Search report issued (novelty assessment)
- Publication at 18 months from filing
- Grant (no substantive examination in Belgium)
Limitations
- No substantive examination: Belgian patents are granted without verifying novelty/inventiveness
- Limited territorial scope: Only valid in Belgium
- Weak enforcement: Courts may invalidate during litigation
European Patent Protection
European Patent (EP) via European Patent Office (EPO)
Filing Office: European Patent Office
Website: https://www.epo.org
Costs (Approximate)
| Stage | Official Fees | Attorney Fees |
|---|---|---|
| Filing + Search | €1,400 | €3,000 - €6,000 |
| Examination | €1,880 | €2,000 - €4,000 |
| Grant + Validation | €900 + validation costs | €1,000 - €2,000 |
| Validation (per country) | €200 - €1,500/country | €300 - €800/country |
| Annual fees | Varies by country | - |
| Total (8 key countries, 10 years) | ~€25,000 - €35,000 | €8,000 - €15,000 |
Process Timeline
- Filing (Month 0)
- Search Report (Month 6-9)
- Publication (Month 18)
- Examination Request (within 6 months of search report)
- Examination (2-4 years from filing)
- Grant (Month 36-60)
- Validation in chosen countries (within 3 months of grant)
Key Countries for Validation
Consider validating in countries with:
- Major manufacturing (Germany, France, Italy)
- Key competitors' locations
- Important markets for robotics
Unitary Patent (UP) - New Option (June 2023)
Coverage: 17 EU member states with single validation
Cost Advantage: Single annual fee instead of per-country fees
| Stage | Fees |
|---|---|
| UP Registration | €0 (no additional filing fee) |
| Annual Fees (single fee) | €5,000 total over 20 years |
Note: Does not cover Spain, Poland, or non-EU countries (UK, Switzerland, etc.)
International Patent Protection
PCT (Patent Cooperation Treaty) Application
Administered by: World Intellectual Property Organization (WIPO)
Website: https://www.wipo.int/pct/en/
The PCT provides a unified filing procedure for 157 countries, delaying national phase costs by 30-31 months.
Costs
| Stage | Official Fees | Attorney Fees |
|---|---|---|
| International Filing | €1,500 - €2,000 | €3,000 - €5,000 |
| International Search | €2,000 - €2,500 | Included above |
| International Publication | Included | - |
| National Phase (per region) | Varies | €2,000 - €5,000/region |
Timeline
- Filing (Month 0) - Priority date established
- International Search Report (Month 3-4)
- International Publication (Month 18)
- National/Regional Phase Entry (Month 30-31)
- National Examination in each country (Years 2-5)
Major Economic Areas - National Phase Costs
| Region/Country | Official Fees | Attorney Fees | Annual Fees (20 yrs) |
|---|---|---|---|
| USA | 2,000−2,000−3,000 | 5,000−5,000−15,000 | $15,000 |
| Europe (EP) | €3,000 - €5,000 | €8,000 - €15,000 | €20,000+ |
| China | 500−500−1,000 | 2,000−2,000−5,000 | $3,000 |
| Japan | 1,500−1,500−2,500 | 4,000−4,000−8,000 | $10,000 |
| South Korea | 500−500−1,000 | 2,000−2,000−4,000 | $5,000 |
Trade Secret Protection
When to Consider Trade Secrets
Trade secret protection may be preferable if:
- The innovation is difficult to reverse-engineer
- You can maintain strict confidentiality
- The technology evolves rapidly (patents may become obsolete)
- Patent enforcement would be difficult
Implementation Steps
- Identify confidential information
- Mark documents as "CONFIDENTIAL" or "TRADE SECRET"
- Restrict access on a need-to-know basis
- Use NDAs with employees, contractors, and partners
- Implement technical security measures
- Document your trade secret protection efforts
Sample NDA Clause for Algorithm
"Confidential Information" includes, but is not limited to, the nominal path correction algorithm, including the method of calculating trajectory corrections by applying inverse error vectors to 6DOF spline representations, the specific implementation of orientation correction in tangent space, and all related technical documentation, source code, and know-how.
Recommended Timeline
Phase 1: Immediate (Week 1)
- Send registered letter to yourself with technical description
- File i-DEPOT online (€37)
- Conduct preliminary patent search (espacenet.com, Google Patents)
Phase 2: Short-term (Month 1-3)
- Consult patent attorney for patentability assessment
- Decide on filing strategy
- Prepare draft patent application
Phase 3: Filing (Month 3-12)
- File Belgian national patent OR
- File European patent application OR
- File PCT application (if international protection needed)
Phase 4: International (Month 12-30)
- Respond to search report
- Decide on national phase entries (if PCT)
- Budget for validation and maintenance fees
Sample Registered Letter Text
Dutch Version (For Belgian registered mail)
AANGETEKEND VERZENDEN - NIET OPENEN
Brussel, [DATUM]
Betreft: Bewijs van uitvinding - Nominale Pad Correctie Algoritme voor
Robot Trajectorie Compensatie
Geachte,
Ondergetekende, [VOLLEDIGE NAAM], wonende te [ADRES], verklaart hierbij
de uitvinder te zijn van het volgende technische concept:
TITEL: Nominale Pad Correctie Algoritme voor Robot Trajectorie Compensatie
TECHNISCHE BESCHRIJVING:
Een methode voor het corrigeren van robottrajectorieën door gemeten 6DOF
(6 Degrees of Freedom) paden te vergelijken met een nominale (ideale) spline
en een gecompenseerde spline te genereren die systematische fouten elimineert.
Het kernprincipe is gebaseerd op de toepassing van inverse foutcorrectie:
Gecorrigeerd = Nominaal - Fout
= Nominaal - (Gemeten - Nominaal)
= 2 × Nominaal - Gemeten
BELANGRIJKSTE INNOVATIEVE ELEMENTEN:
1. De methode voor het berekenen van trajectcorrecties door het toepassen
van inverse foutvectoren op zowel positie als oriëntatie.
2. De combinatie van 6DOF B-spline fitting met foutcompensatie, waarbij
posities worden behandeld in Euclidische ruimte en oriëntaties in de
tangentiële ruimte (rotation vectors).
3. De specifieke implementatie van oriëntatiecorrectie:
- Berekening van oriëntatiefout als: q_error = q_gemeten × q_nominaal^(-1)
- Toepassing van inverse correctie: q_gecorrigeerd = q_nominaal × q_error^(-1)
4. De parameter mapping methode om correspondentie te vinden tussen
meetpunten en spline parameters via optimalisatie.
5. Het iteratieve verfijningsproces voor high-precision toepassingen.
DATUM VAN CONCEPTIE: [DATUM]
BIJLAGEN:
- Technische documentatie (Nominal Path Correction.md)
- Broncode implementatie (nominal_correction.py)
- Unit tests (test_nominal_correction.py)
- Algoritme analyse documentatie
Deze brief dient als bewijs van het bestaan van bovenstaande uitvinding
op de datum van verzending.
Hoogachtend,
[HANDTEKENING]
[VOLLEDIGE NAAM]
[DATUM]
English Version
SEND BY REGISTERED MAIL - DO NOT OPEN
Brussels, [DATE]
Subject: Evidence of Invention - Nominal Path Correction Algorithm for
Robot Trajectory Compensation
To whom it may concern,
I, the undersigned, [FULL NAME], residing at [ADDRESS], hereby declare
to be the inventor of the following technical concept:
TITLE: Nominal Path Correction Algorithm for Robot Trajectory Compensation
TECHNICAL DESCRIPTION:
A method for correcting robot trajectories by comparing measured 6DOF
(6 Degrees of Freedom) paths against a nominal (ideal) spline and generating
a compensated spline that eliminates systematic errors.
The core principle is based on applying inverse error correction:
Corrected = Nominal - Error
= Nominal - (Measured - Nominal)
= 2 × Nominal - Measured
KEY INNOVATIVE ELEMENTS:
1. The method of calculating trajectory corrections by applying inverse
error vectors to both position and orientation components.
2. The combination of 6DOF B-spline fitting with error compensation,
treating positions in Euclidean space and orientations in tangent
space (rotation vectors).
3. The specific implementation of orientation correction:
- Calculation of orientation error as: q_error = q_measured × q_nominal^(-1)
- Application of inverse correction: q_corrected = q_nominal × q_error^(-1)
4. The parameter mapping method to establish correspondence between
measurement points and spline parameters via optimization.
5. The iterative refinement process for high-precision applications.
DATE OF CONCEPTION: [DATE]
ENCLOSURES:
- Technical documentation (Nominal Path Correction.md)
- Source code implementation (nominal_correction.py)
- Unit tests (test_nominal_correction.py)
- Algorithm analysis documentation
This letter serves as evidence of the existence of the above invention
on the date of mailing.
Respectfully,
[SIGNATURE]
[FULL NAME]
[DATE]
Comparison Table
Protection Options Comparison
| Option | Initial Cost | Annual Cost | Duration | Geographic Scope | Time to Protection | Examination | Legal Strength | Best For |
|---|---|---|---|---|---|---|---|---|
| Registered Letter | €5-10 | €0 | Unlimited | Evidence only | Immediate | None | Weak (supporting evidence) | Quick evidence establishment |
| i-DEPOT | €37 | €7.40/year (after 5 yrs) | Renewable | Benelux (evidence) | Same day | None | Medium (official record) | Affordable date proof |
| Notarized Document | €50-150 | €0 | Unlimited | Evidence only | Same day | None | Strong (for evidence) | Legal proceedings support |
| Belgian Patent | €2,350-5,000 | €40-600 | 20 years | Belgium only | 6-12 months | Formal only | Medium (unexamined) | Low-cost national protection |
| European Patent (EP) | €15,000-25,000 | €2,000-5,000 | 20 years | Up to 39 countries | 3-5 years | Full substantive | Strong | European market focus |
| Unitary Patent (UP) | €12,000-20,000 | €250-500 | 20 years | 17 EU states | 3-5 years | Full substantive | Strong | Simplified EU protection |
| PCT + National Phase | €30,000-80,000 | €5,000-15,000 | 20 years | 157 countries | 4-6 years | Varies by country | Strong | Global protection |
| Trade Secret | €500-2,000 (legal setup) | €0 (internal) | Unlimited | Worldwide | Immediate | N/A | Variable | Hard-to-reverse-engineer tech |
Decision Matrix
| Your Situation | Recommended Approach | Estimated Total Cost (10 years) |
|---|---|---|
| Limited budget, want evidence | i-DEPOT + Trade Secret | €100-500 |
| Belgian market only | Belgian Patent + i-DEPOT | €5,000-8,000 |
| European market focus | EP via EPO (4-6 countries) | €25,000-40,000 |
| European market (simplified) | EP + Unitary Patent | €20,000-30,000 |
| Global protection needed | PCT → EP + US + CN + JP | €60,000-100,000 |
| Uncertain about patentability | i-DEPOT now, patent search, decide later | €500-2,000 initial |
Advantages and Disadvantages Summary
| Option | Advantages | Disadvantages |
|---|---|---|
| Registered Letter | ✅ Cheapest option ✅ Immediate ✅ No formalities | ❌ Weak legal standing ❌ No IP rights granted ❌ Must remain sealed |
| i-DEPOT | ✅ Affordable ✅ Official recognition ✅ Quick process ✅ Digital storage | ❌ No IP rights granted ❌ Only evidence of existence ❌ Limited to Benelux recognition |
| Belgian Patent | ✅ Relatively affordable ✅ Fast grant (no examination) ✅ Local protection | ❌ No novelty examination ❌ Limited geographic scope ❌ May be invalidated in court |
| European Patent | ✅ Strong protection ✅ Substantive examination ✅ Wide geographic coverage ✅ Single procedure | ❌ Expensive ❌ Long timeline (3-5 years) ❌ Requires validation per country ❌ Complex annual fee management |
| Unitary Patent | ✅ Single annual fee ✅ 17 countries with one action ✅ Unified litigation | ❌ Does not cover all EU ❌ New system (less case law) ❌ No coverage outside EU |
| PCT Application | ✅ Delays major costs 30 months ✅ Single international search ✅ Flexibility in country selection | ❌ Most expensive overall ❌ Complex process ❌ Still requires national filings |
| Trade Secret | ✅ No registration required ✅ Unlimited duration ✅ No disclosure required ✅ Immediate effect | ❌ Lost if disclosed/reverse-engineered ❌ No protection against independent invention ❌ Difficult to enforce ❌ Requires ongoing secrecy measures |
Fiscal Advantages - Belgian Innovation Income Deduction
Beyond protection, patents in Belgium offer significant tax advantages through the Innovation Income Deduction (IID), also known as the "Belgian Patent Box" regime. This can dramatically reduce the effective tax rate on income derived from patented inventions.
Overview of the Innovation Income Deduction (IID)
The Innovation Income Deduction, introduced on July 1, 2016, allows Belgian companies to deduct 85% of qualifying net IP income from their taxable base. This effectively reduces the corporate tax rate on patent-related income from the standard 25% to approximately 3.75%.
| Aspect | Details |
|---|---|
| Deduction Rate | 85% of net qualifying IP income |
| Standard Corporate Tax | 25% |
| Effective Tax Rate (IID) | ~3.75% (large companies) |
| Effective Tax Rate (SMEs) | ~3.0% (due to 20% reduced rate on first €100k) |
| Applicable Since | July 1, 2016 |
| Replaces | Former Patent Income Deduction (80% deduction) |
Qualifying Intellectual Property Rights
The IID applies to income from the following IP assets:
| IP Type | Qualification Requirements |
|---|---|
| Patents | Belgian, European, or international patents |
| Supplementary Protection Certificates | Extensions for pharmaceuticals/plant protection |
| Plant Breeders' Rights | Requested or acquired since July 1, 2016 |
| Orphan Drug Designations | First 10 years of designation |
| Data/Market Exclusivity | Granted by regulatory authorities |
| Copyright-Protected Software | Must result from qualifying R&D project |
Important for this algorithm: The nominal path correction algorithm could qualify under:
- A Belgian or European patent covering the method
- Copyright-protected software if the implementation results from documented R&D
Qualifying Income Types
The following income streams can benefit from the IID:
- License fees received from third parties for use of the IP
- Embedded royalties - IP value included in product sales prices
- Process innovation income - Cost savings from improved manufacturing processes
- Compensation from court decisions, arbitration, or settlements
- Insurance payouts related to IP infringement
Calculation Method: The Nexus Approach
Belgium follows the OECD Modified Nexus Approach, which links the tax benefit to actual R&D activities performed by the company. The deduction is calculated as:
IID = Net IP Income × Nexus Ratio × 85%
Nexus Ratio Formula:
Qualifying R&D Expenditure × 130%
Nexus Ratio = ────────────────────────────────────────
Total R&D Expenditure
(Maximum 100%)
Where:
- Qualifying R&D Expenditure = Own R&D costs + Outsourcing to unrelated parties
- Total R&D Expenditure = Qualifying costs + IP acquisition costs + Outsourcing to related parties
- 130% Uplift = Compensates for non-qualifying expenditure (capped at 100%)
Example Calculation:
| Item | Amount |
|---|---|
| Gross IP Income (license fees) | €100,000 |
| R&D Costs (own development) | €30,000 |
| Net IP Income | €70,000 |
| Nexus Ratio (100% own R&D) | 100% |
| IID Deduction (85%) | €59,500 |
| Taxable IP Income | €10,500 |
| Tax at 25% | €2,625 |
| Effective Tax Rate | 3.75% |
2024-2025 Legislative Changes
Recent legislation has introduced important changes to the IID regime:
Law of May 12, 2024 - New Tax Credit Option
Starting from assessment year 2025 (financial years ending December 31, 2024 onwards):
- Companies can convert unused IID into a non-refundable tax credit
- Tax credit = Unused IID × 25% (standard corporate tax rate)
- Credit can be carried forward indefinitely
Particularly beneficial for:
- Startups with no current profits
- Companies subject to Pillar Two (global minimum tax)
- SMEs that want the credit calculated at 25% vs. their 20% reduced rate
Example - Tax Credit Conversion:
| Scenario | Traditional IID | New Tax Credit Option |
|---|---|---|
| Available IID | €50,000 | €50,000 |
| Current taxable profit | €0 | €0 |
| Immediate benefit | €0 (carried forward) | €0 |
| Tax credit created | N/A | €12,500 (€50,000 × 25%) |
| Future use | Deduction when profitable | Credit against future tax |
Proposed Stricter Requirements (Under Discussion)
The Belgian government has proposed stricter patent requirements for the IID, potentially effective from 2024:
| Company Size | Current Requirement | Proposed Requirement |
|---|---|---|
| Large Companies | Any qualifying patent | European patent OR multiple non-EU national patents |
| SMEs | Any qualifying patent | Belgian patent with positive patentability opinion on novelty and inventiveness |
Implication: For SMEs, a Belgian patent may still qualify, but only if the search report provides a predominantly positive opinion on patentability. This increases the importance of the patent search report quality.
Practical Example: Robot Trajectory Correction Algorithm
Here's how the IID could apply to income from the nominal path correction algorithm:
Scenario: You license the algorithm to robot integrators for €50,000/year
| Item | Year 1 | Year 2 | Year 3 |
|---|---|---|---|
| License Income | €50,000 | €50,000 | €50,000 |
| Allocable R&D Costs | €20,000 | €10,000 | €5,000 |
| Net IP Income | €30,000 | €40,000 | €45,000 |
| IID (85%) | €25,500 | €34,000 | €38,250 |
| Taxable Income | €4,500 | €6,000 | €6,750 |
| Tax (25%) | €1,125 | €1,500 | €1,688 |
| Tax Savings vs. No Patent | €6,375 | €8,500 | €9,563 |
3-Year Tax Savings: €24,438 (compared to standard 25% taxation)
Comparison: With vs. Without Patent
| Metric | Without Patent | With Patent + IID |
|---|---|---|
| License income (3 years) | €150,000 | €150,000 |
| Standard tax (25%) | €37,500 | - |
| Effective tax (IID) | - | €4,313 |
| Net After Tax | €112,500 | €145,687 |
| Additional Benefit | - | +€33,187 |
When to Claim the IID
The IID can be claimed from the date of patent application, provided the patent is eventually granted. This means:
- File patent application → Establish priority date
- Start claiming IID → On qualifying income immediately
- If patent denied → Recapture of previously claimed deductions may apply
Documentation Requirements
To claim the IID, you must maintain:
- R&D project documentation proving the IP results from qualifying research
- Cost allocation records linking R&D expenses to specific IP assets
- Income tracking separating IP income from other revenue
- Nexus ratio calculation with supporting documentation
- Transfer pricing documentation if transactions with related parties
Combining with Other R&D Incentives
Belgium offers additional R&D tax incentives that can be combined with the IID:
| Incentive | Benefit | Combinable with IID? |
|---|---|---|
| R&D Tax Credit | 13.5% of R&D investments | Yes |
| Partial Exemption from Withholding Tax | 80% exemption for R&D personnel | Yes |
| Investment Deduction for R&D | 13.5% one-shot or 20.5% spread | Yes |
| Regional R&D Grants | Direct funding | Yes (reduces net IP income) |
Key Takeaways for Patent Strategy
- Belgian patent = IID eligibility for SMEs (with positive search report)
- European patent preferred for large companies under proposed rules
- Effective tax rate of 3-4% on patent income vs. 25% standard rate
- Start claiming immediately upon patent application filing
- Document R&D thoroughly to maximize nexus ratio
- New tax credit option (2025) helps startups with no current profits
References and Further Reading
Official Sources
- Belgian Federal Finance - R&D Tax Incentives 2024 (PDF)
- Belgian Tax Code - Art. 205/1-205/4 WIB (Innovation Deduction)
Professional Guidance
- PWC Belgium - Tax Credits and Incentives
- EY Belgium - Modernized Investment and IP Regime (2024)
- BDO Belgium - Innovation Income Deduction
- Belgian Patent Box Official Site
Recent News and Updates
- FI Group - June 2024 IID Amendments
- Tax Foundation - Patent Box Regimes in Europe 2025
- Osborne Clarke - Belgium R&D Tax Incentives
OECD Framework
Next Steps Checklist
Immediate (This Week)
- Print and sign the registered letter (Dutch or English version)
- Include printed copies of all technical documentation
- Send via registered mail (Bpost "Aangetekend/Recommandé")
- Store the sealed envelope in a safe location
- Consider filing i-DEPOT online at boip.int
Short Term (Next Month)
- Conduct prior art search on espacenet.com
- Schedule consultation with Belgian patent attorney
- Assess commercial potential and market scope
- Define geographic protection priorities
Medium Term (3-6 Months)
- Decide on patent filing strategy
- Prepare patent application (with attorney if filing)
- File application before any public disclosure
- Implement trade secret measures for non-patented aspects
Useful Contacts
Belgian Authorities
OPRI (Office de la Propriété Intellectuelle)
BOIP (Benelux Office for Intellectual Property)
- Website: https://www.boip.int
- i-DEPOT: https://www.boip.int/en/entrepreneurs/ideas/i-depot
European & International
European Patent Office (EPO)
- Website: https://www.epo.org
- Online filing: https://www.epo.org/applying/online-services.html
WIPO (World Intellectual Property Organization)
- Website: https://www.wipo.int
- PCT: https://www.wipo.int/pct/en/
Free Patent Databases
- Espacenet: https://worldwide.espacenet.com
- Google Patents: https://patents.google.com
- USPTO: https://www.uspto.gov/patents/search